Sidewalk Aid
Sidewalk Aid
Sidewalk Aid
Engineering Capstone Project, IGEN 230
Engineering Capstone Project, IGEN 230
Engineering Capstone Project, IGEN 230
Nov 2019 - Apr 2020
Nov 2019 - Apr 2020
Nov 2019 - Apr 2020
Context
Integrated Engineering (IGEN) is a unique program at UBC, in which students complete self-directed design projects in years 2-4. The projects serve as an opportunity to gain practical experience in engineering design principles, teamwork, management and independent learning of additional technologies not taught in courses. In IGEN 230, I originally pitched a robotized version of a white cane with GPS navigation and object detection features.
Team Members: Niko Andrianos, Mika Nogami, Abdullah Raja, Han Yu & Jenny Zhang
Technologies: Raspberry Pi, OpenCV, SolidWorks, Ultrasonic Sensors
Role: Mechanical Hardware Designer
Recipient of the Faculty Award in IGEN for UBC APSC's Design and Innovation Day
Context
IGEN 430 is the Advanced Engineering Design Projects course taken by students in the final year of their degree. It spans the full academic year, and
Team Members: Mika Nogami, Beatrice Tam, Josiann Zhou
Technologies: OpenCV, MediaPipe Hands, React, p5.js, Solidworks, 3D Printing, Sensors (Flex, Force, IMU)
Problem
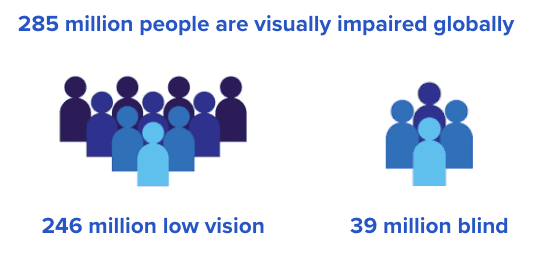
For the visually impaired community, the main options for assistance are white canes and guide dogs.
White canes are the most common and accessible option but have limitations on what obstacles they can detect.
Guide dogs are limited and very costly, and some visually impaired people wait years to get matched.
We found there is a lack of commercially available assistive devices to serve this community. Specifically, a device that provides useful features while remaining a cost-effective, viable option.
Problem
For the visually impaired community, the main options for assistance are white canes and guide dogs.
White canes are the most common and accessible option but have limitations on what obstacles they can detect.
Guide dogs are limited and very costly, and some visually impaired people wait years to get matched.
We found there is a lack of commercially available assistive devices to serve this community. Specifically, a device that provides useful features while remaining a cost-effective, viable option.
Idea Generation
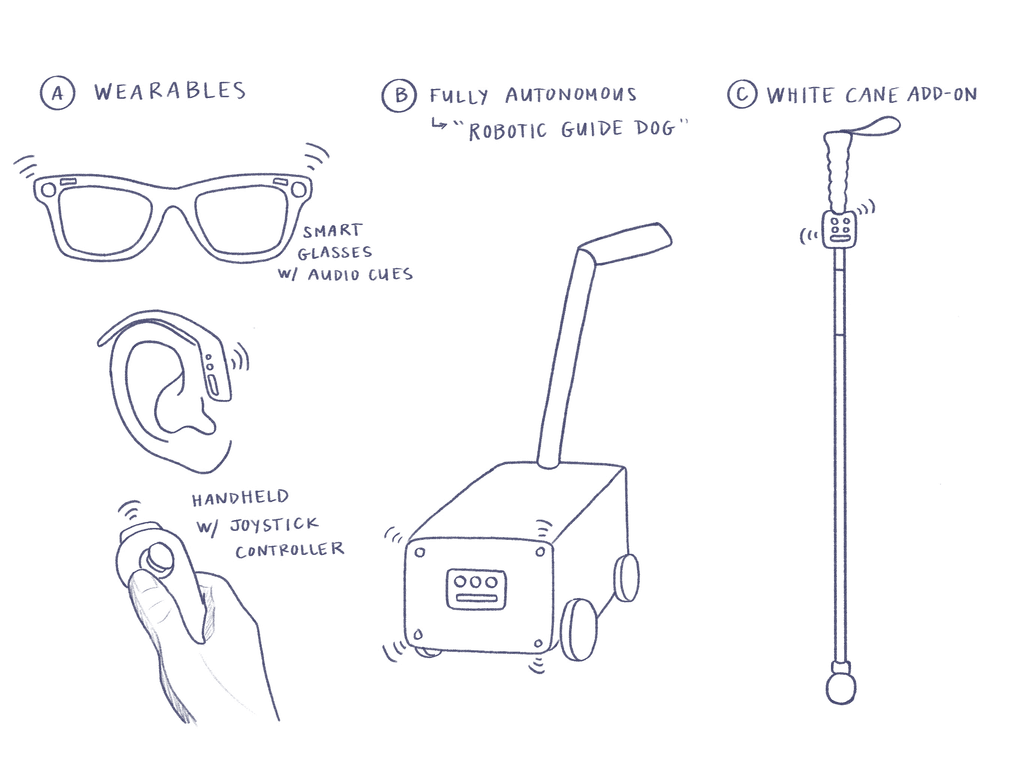
Through several rounds of C-sketching, we decided on three potential assistive devices: wearable, fully autonomous and a white cane add-on.
Idea Generation
Through several rounds of C-sketching, we decided on three potential assistive devices: wearable, fully autonomous and a white cane add-on.
Initial Design
After doing research on existing products, we found WeWalk, a smart cane that also detects objects from the height of the handle. Our team liked this idea, but it is an expensive device, priced at $650. We realized that we could create an alternative version as a white cane add-on.
Initial Design
After doing research on existing products, we found WeWalk, a smart cane that also detects objects from the height of the handle. Our team liked this idea, but it is an expensive device, priced at $650. We realized that we could create an alternative version as a white cane add-on.
User Interviews
All of the design choices we made up until this point were based on assumptions. As all of us are sighted people, we realized that we could not possibly understand the needs of our users to an accurate degree.
We sent out an online survey to social media groups as well as reached out to local organizations like CNIB.
The feedback we received was extremely valuable and allowed us to gain perspective as we pivoted our design.
We originally thought object detection, especially overhead, was the most important feature to address in our design. However, we learned that many visually impaired people struggle with walking in a straight line, particularly when walking on sidewalks and crosswalks.
User Interviews
All of the design choices we made up until this point were based on assumptions. As all of us are sighted people, we realized that we could not possibly understand the needs of our users to an accurate degree.
We sent out an online survey to social media groups as well as reached out to local organizations like CNIB.
The feedback we received was extremely valuable and allowed us to gain perspective as we pivoted our design.
We originally thought object detection, especially overhead, was the most important feature to address in our design. However, we learned that many visually impaired people struggle with walking in a straight line, particularly when walking on sidewalks and crosswalks.
Iteration
Our initial design was a white cane attachment that utilized ultrasonic sensors to detect overhead objects, and in turn, would send haptic feedback to the user.
Consulting with users posed several flaws
extra weight causes strain on wrist
movement from the cane produces unreliable data
a series of haptic feedback could be confusing for the user to distinguish hazard location, etc.
Iteration
Our initial design was a white cane attachment that utilized ultrasonic sensors to detect overhead objects, and in turn, would send haptic feedback to the user.
Consulting with users posed several flaws
extra weight causes strain on wrist
movement from the cane produces unreliable data
a series of haptic feedback could be confusing for the user to distinguish hazard location, etc.
New Proposed Solution
The user interviews allowed us to make more educated decisions which completely shaped our new design.
Design changes/improvements
white cane attachment -> wearable device
sidewalk detection as our primary focus (obstacle detection as a secondary feature)
haptic feedback -> auditory feedback
New Proposed Solution
The user interviews allowed us to make more educated decisions which completely shaped our new design.
Design changes/improvements
white cane attachment -> wearable device
sidewalk detection as our primary focus (obstacle detection as a secondary feature)
haptic feedback -> auditory feedback
Final Design
Final Design
Mechanical & Hardware
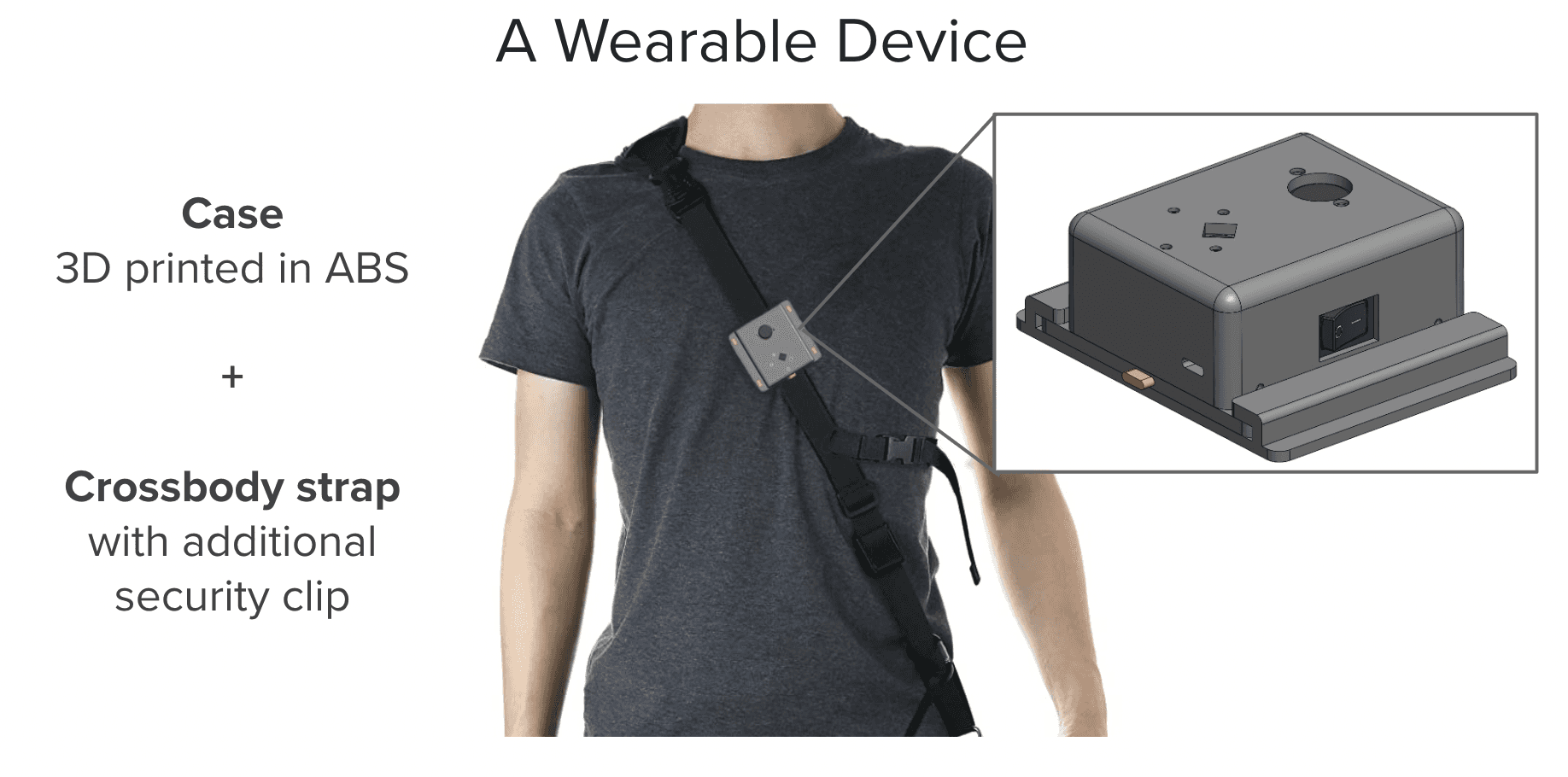
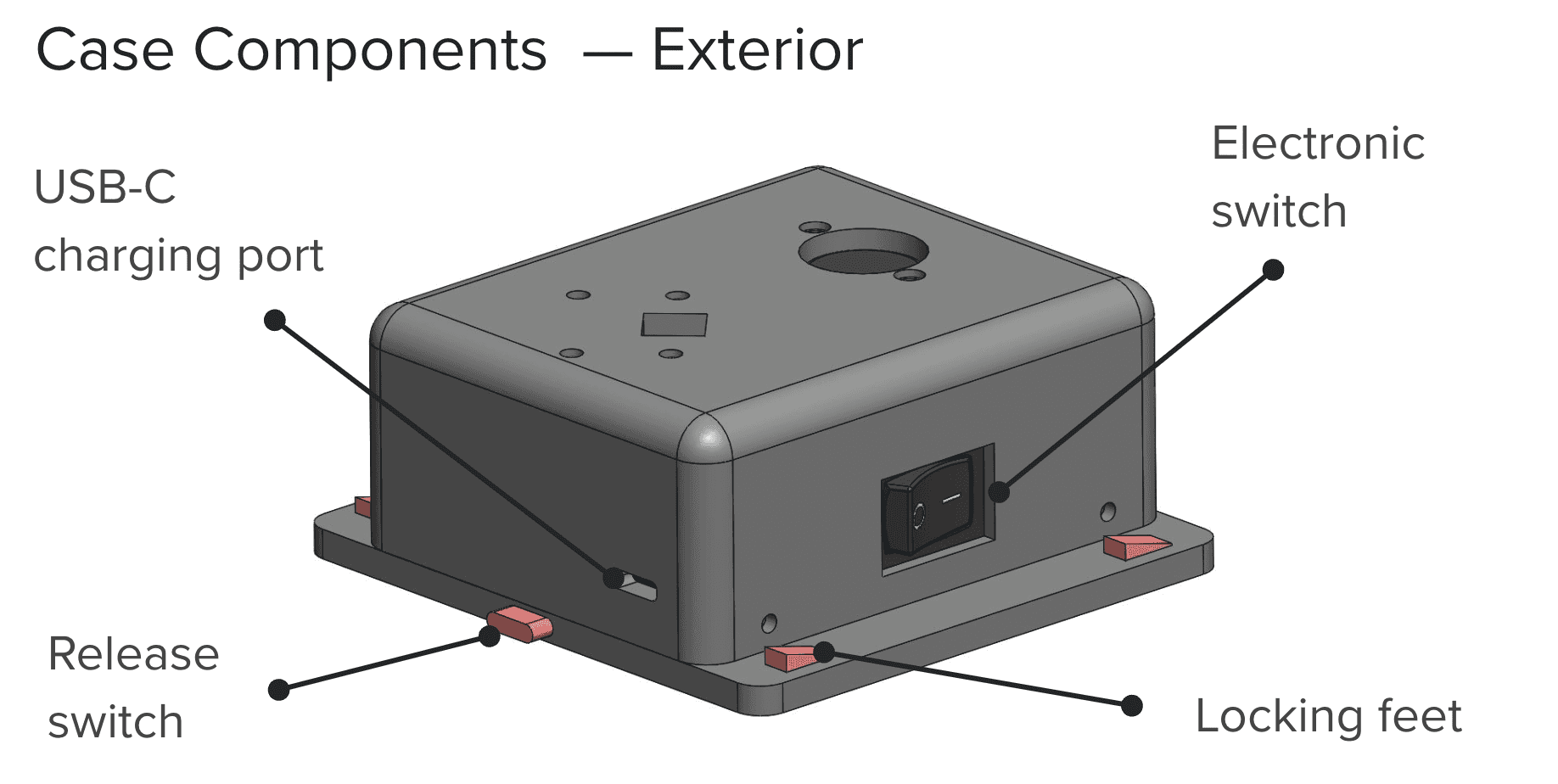
The mechanical casing secures the electrical components in place and protects them from damage caused by falls or drops. The bottom plate is attached to a crossbody strap, and the main case is secured through a locking mechanism, highlighted in red. This allows the users to easily detach/reattach the device if they choose to use it as a handheld, which some of our stakeholders suggested.
Mechanical & Hardware
The mechanical casing secures the electrical components in place and protects them from damage caused by falls or drops. The bottom plate is attached to a crossbody strap, and the main case is secured through a locking mechanism, highlighted in red. This allows the users to easily detach/reattach the device if they choose to use it as a handheld, which some of our stakeholders suggested.
Computer Vision & Ultrasonic Sensors
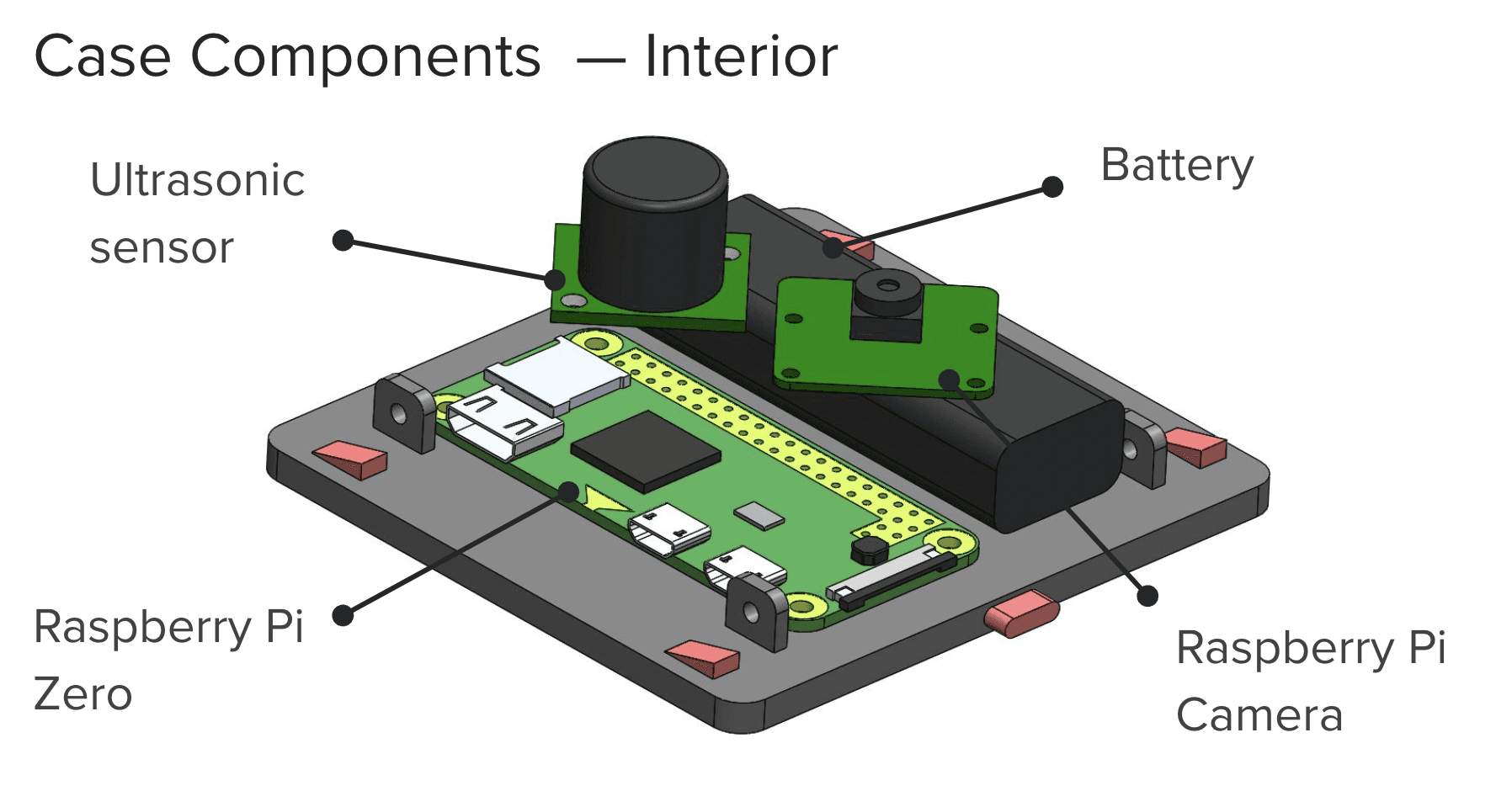
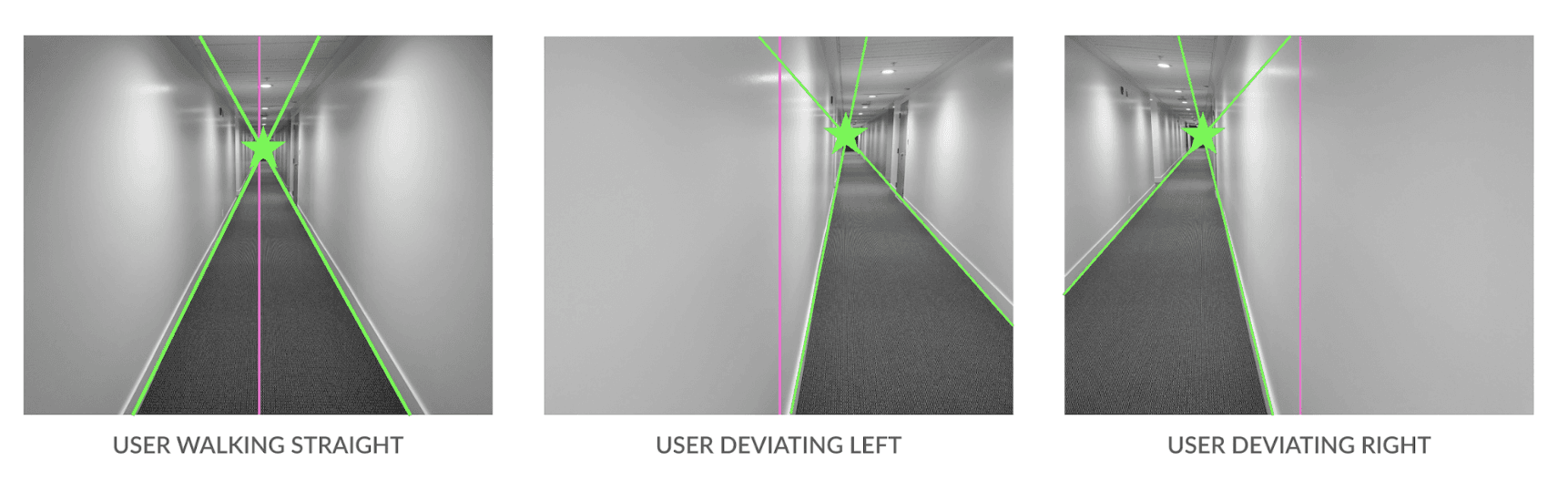
The raspberryPi camera takes a series of pictures which are computed in a vanishing point algorithm using OpenCV. Sidewalks are particularly challenging for white cane users as they can be level with the road, thus hard to detect the edge. Computer vision is able to detect differences in colour and texture in an image, and therefore distinguish the road from the sidewalk. Once calculating the vanishing point, the device will compare the deviation from the center, and alert the user if they are veering to the right or left.
Computer Vision & Ultrasonic Sensors
The raspberryPi camera takes a series of pictures which are computed in a vanishing point algorithm using OpenCV. Sidewalks are particularly challenging for white cane users as they can be level with the road, thus hard to detect the edge. Computer vision is able to detect differences in colour and texture in an image, and therefore distinguish the road from the sidewalk. Once calculating the vanishing point, the device will compare the deviation from the center, and alert the user if they are veering to the right or left.
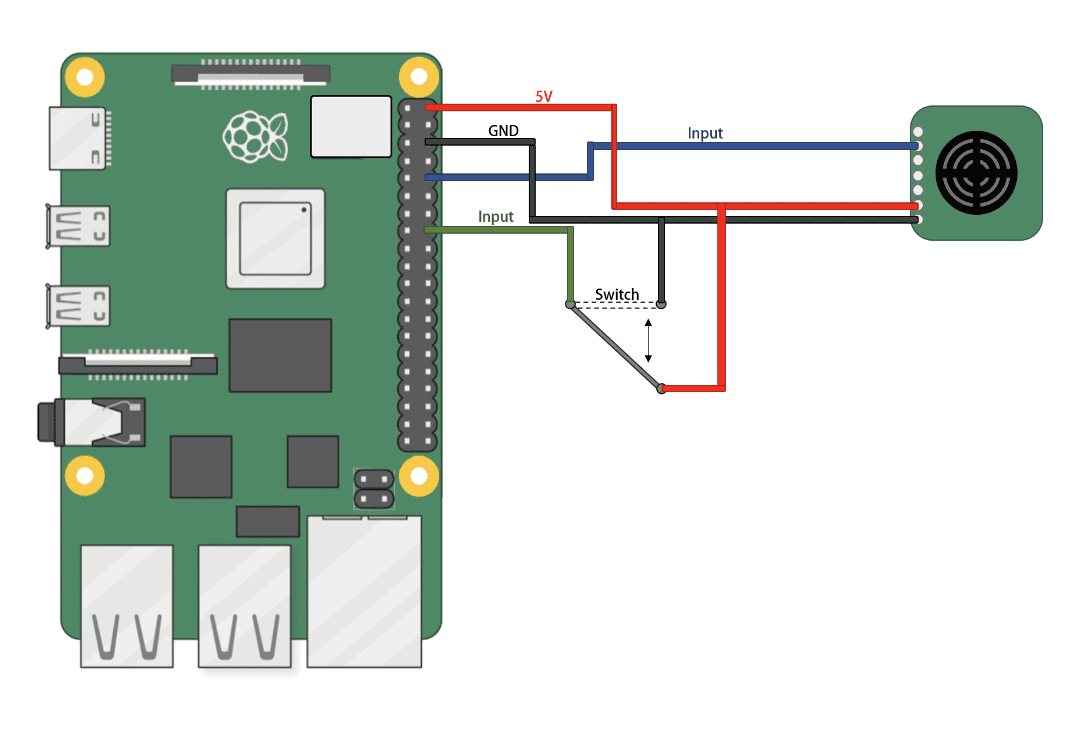
To detect danger in the user's path, the ultrasonic sensors
continuously detect distance from objects
read switch input from user for use in different environments (outside vs inside, empty vs busy)
ON = detects objects up to 4 meters away
OFF = detects objects up to 2 meters away
send 1 of 4 audio signals to the user based on switch and distance readings
Conclusion
As this project was wrapping up, in-person activity was halted, and thus the final integration of work could not be completed. Each subcomponent was tested individually and passed our specifications criteria.
This project was an invaluable lesson on the importance of stakeholder analysis in engineering design. If we stuck with our initial design, it likely would have satisfied our requirements and needs, but it would not be adopted into our user's lives. In turn, this would be a failure of a product and engineering design. A good design in theory does not always equate to a good design for everyday users!
Conclusion
As this project was wrapping up, in-person activity was halted, and thus the final integration of work could not be completed. Each subcomponent was tested individually and passed our specifications criteria.
This project was an invaluable lesson on the importance of stakeholder analysis in engineering design. If we stuck with our initial design, it likely would have satisfied our requirements and needs, but it would not be adopted into our user's lives. In turn, this would be a failure of a product and engineering design. A good design in theory does not always equate to a good design for everyday users!
Kaylee Jung
© 2024